In this hyper-connected electronic world, knowing how to send and receive data remotely with sockets is crucial. In this article, we will see how a socket is essentially a digital “plug” that we can attach to a local or remote address in order to establish a connection. We will also explore the architecture and system calls that allow us to create not only a client but also a server in the C programming language.
Everyone has probably heard the saying that in Unix systems, “everything is a file”. Sockets are no exception. Indeed, a socket is simply a file descriptor that enables remote communication. There are several different types of sockets, but in this article, we will concentrate on Internet sockets.
Of course, there are also many types of Internet sockets which all have different ways to transmit data. Among them, the two main types are:
We’ve had the chance to explore both of these protocols, TCP and UDP in the article about the network layers of the Internet. In this article, we will mainly focus on stream sockets, and see how we can use them for remote communication.
Whenever we wish to send and receive data from one computer to another, we must keep in mind that systems can represent their data in two distinct and opposite ways. Take for example the hexadecimal integer 2F0A (which is 12042 in decimal). Because of its size, this integer must be stored over two bytes: 2F and 0A .
It is logical to assume that this integer will always be stored in this order: 2F , followed by 0A . This is the most common ordering, known as “big endian” since the big end of the number, the most significant byte, is stored first. But this is not always the case…
In some systems, particularly those with an Intel or Intel-compatible processor, prefer storing the bytes of our integer in the opposite order, with the least significant, or small end, first: 0A followed by 2F . We call this ordering “little endian”.
First Byte Second Byte Big Endian - hexadecimal 2F 0A - binary 00101111 00001010 Little Endian - hexadecimal 0A 2F - binary 00001010 00101111 This potentially incompatible difference between host systems can of course cause some issues during data transfer.
The Network Byte Order is always big endian. But the Host Byte Order can be either big endian, or little endian, depending on its architecture.
Thankfully, we can simply assume that the host system is not storing its bytes in the right order compared to the network. All we then need to do is to systematically reorder these bytes when we transfer them between the network and host systems. For this, we can make use of four handy functions from the library:
uint32_t htonl(uint32_t hostlong); //"Host to network long" uint16_t htons(uint16_t hostshort); //"Host to network short" uint32_t ntohl(uint32_t netlong); //"Network to host long" uint16_t ntohs(uint16_t netshort); //"Network to host short" As we can see, these functions come in two variants: the ones that convert a short (two bytes, or 16 bits), and those that convert a long (four bytes or 32 bits). They also work for unsigned integers.
In order to convert a four byte (32 bit) integer from the Host Byte Order to the Network Byte Order, we’ll want to call the htonl() function (“htonl” stands for “Host to Network Long”). For the opposite operation, we’d use ntohl() (“Network to Host Long”).
With this word of warning in mind, we can now turn to the issue of establishing a connection within our program.
Whether our program is a server or a client, the first thing we need to do is prepare a small data structure. This structure will contain the information that our socket will need: notably, the IP address and the port to connect to.
The basic structures we need to use in order to hold the IP address and port we want to connect to can be found in the library. There are two variants of them: one for IPv4 and one for IPv6.
For an IPv4 address, we will use the sockaddr_in structure, which is defined as follows:
// IPv4 only (see sockaddr_in6 for IPv6) struct sockaddr_in sa_family_t sin_family; in_port_t sin_port; struct in_addr sin_addr; >; struct in_addr uint32_t s_addr; >; Let’s take a closer look at what we need to supply to this structure:
There is only one field to fill out in the in_addr structure: s_addr. It is a Network Byte Order integer that represents an IPv4 address. We will examine below how to convert an IP address into an integer. However, there are a few constants that we could use here (without forgetting to convert the order of their bytes with htonl() !):
A similar structure exists to specify an IPv6 address:
// IPv6 only (see sockaddr_in for IPv4) struct sockaddr_in6 sa_family_t sin6_family; in_port_t sin6_port; uint32_t sin6_flowinfo; struct in6_addr sin6_addr; uint32_t sin6_scope_id; >; struct in6_addr unsigned char s6_addr[16]; >; This structure, sockaddr_in6 , expects the same information as the previous IPv4 structure. We won’t linger on the two new fields, sin6_flowinfo and sin6_scope_id , since this is an introduction to sockets.
Just like for IPv4, there are global variables that we can give as the IPv6 address in the in6_addr structure: in6addr_loopback and in6addr_any .
An IPv4 address such as 216.58.192.3 (or an IPv6 address like 2001:db8:0:85a3::ac1f:8001 ) is not an integer. It’s a string of characters. In order to convert this string to an integer that we can use in one of the previous structures, we need to call a function from the library: inet_pton() (“pton” stands for “presentation to network”).
int inet_pton(int af, const char * src, void *dst); Let’s take a closer look at its parameters:
The inet_pton() function returns:
To convert an IPv4 address, we can do something like this:
// IPv4 only struct sockaddr_in sa; inet_pton(AF_INET, "216.58.192.3", &(sa.sin_addr)); For an IPv6 address:
// IPv6 only struct sockaddr_in6 sa; inet_pton(AF_INET6, "2001:db8:0:85a3::ac1f:8001", &(sa.sin6_addr)); Of course, the opposite function exists as well, inet_ntop() (“ntop” meaning “network to presentation”). It allows us to convert an integer into a legible IP address.
But what if we don’t actually know the IP address we want to connect with? Maybe we only have a domain name such as http://www.example.com …
If we don’t know the precise IP address we wish to connect to, the getaddrinfo() function from the library will be able to help us. Among other things, it allows us to supply a domain name ( http://www.example.com ) instead of an IP address. Calling getaddrinfo() will have a slight performance cost since it usually needs to check the DNS to fill out the IP address for us. Its prototype is as follows:
int getaddrinfo(const char *node, const char *service, const struct addrinfo *hints, struct addrinfo **res); This function is not as complicated as it may seem. It’s parameters are:
The getaddrinfo() function returns 0 on success, or an error code on failure. The gai_strerror() can translate the error returned by getaddrinfo() into a readable string.
In addition, the freeaddrinfo() function allows us to free the memory of the addrinfo once we’re done with it. Let’s examine that structure now.
Two of getaddrinfo() ’s parameters, hints and res, are pointers towards the same type of structure. So let’s try to understand it:
struct addrinfo int ai_flags; int ai_family; int ai_socktype; int ai_protocol; size_t ai_addrlen; struct sockaddr *ai_addr; char *ai_canonname; struct addrinfo *ai_next; >; The addrinfo structure contains the following elements:
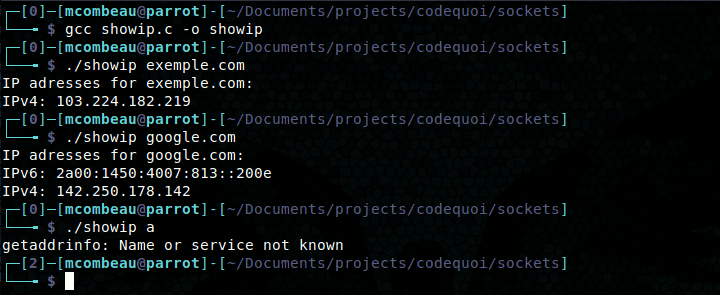
Let’s write a small program that prints the IP addresses for a domain name:
// showip.c -- a simple programme the shows a domain name's IP address(es) #include #include #include #include int main(int ac, char **av) struct addrinfo hints; // Hints or "filters" for getaddrinfo() struct addrinfo *res; // Result of getaddrinfo() struct addrinfo *r; // Pointer to iterate on results int status; // Return value of getaddrinfo() char buffer[INET6_ADDRSTRLEN]; // Buffer to convert IP address if (ac != 2) fprintf(stderr, "usage: /a.out hostname\n"); return (1); > memset(&hints, 0, sizeof hints); // Initialize the structure hints.ai_family = AF_UNSPEC; // IPv4 or IPv6 hints.ai_socktype = SOCK_STREAM; // TCP // Get the associated IP address(es) status = getaddrinfo(av[1], 0, &hints, &res); if (status != 0) // error ! fprintf(stderr, "getaddrinfo: %s\n", gai_strerror(status)); return (2); > printf("IP adresses for %s:\n", av[1]); r = res; while (r != NULL) void *addr; // Pointer to IP address if (r->ai_family == AF_INET) // IPv4 // we need to cast the address as a sockaddr_in structure to // get the IP address, since ai_addr might be either // sockaddr_in (IPv4) or sockaddr_in6 (IPv6) struct sockaddr_in *ipv4 = (struct sockaddr_in *)r->ai_addr; // Convert the integer into a legible IP address string inet_ntop(r->ai_family, &(ipv4->sin_addr), buffer, sizeof buffer); printf("IPv4: %s\n", buffer); > else // IPv6 struct sockaddr_in6 *ipv6 = (struct sockaddr_in6 *)r->ai_addr; inet_ntop(r->ai_family, &(ipv6->sin6_addr), buffer, sizeof buffer); printf("IPv6: %s\n", buffer); > r = r->ai_next; // Next address in getaddrinfo()'s results > freeaddrinfo(res); // Free memory return (0); > When we run this program with a domain name as an argument, we receive the associated IP address(es) as a result:
Now that we know how to get the IP address and store it in the appropriate structure, we can turn our attention to preparing our socket in order to actually establish our connection.
At last, we can create the file descriptor for our socket. With it, we will be able to read and write in order to respectively receive and sent data. The system call from the library, simply named socket() , is what we need! This is its prototype:
int socket(int domain, int type, int protocol); The parameters it requires are as follows:
The socket() function returns the file descriptor of the new socket. In case of failure, it returns -1 and indicates the error it encountered in errno .
In practice, we probably won’t be filling out the socket() function’s parameters manually. Not when we can simply indicate the values returned by getaddrinfo() , a little like this:
int status; int socket_fd; struct addrinfo hints; struct addrinfo *res; // fill out hints to prepare getaddrinfo() call status = getaddrinfo("www.example.com", "http", &hints, &res); // check if getaddrinfo() failed socket_fd = socket(res->ai_family, res->ai_socktype, res->ai_protocol); // check if socket() failed But this socket file descriptor is not yet connected to anything at all. Naturally, we will want to associate it to a socket address (meaning an IP address and port combination). For this, we have two choices:
Let’s first explore the client side, then we can take a look at the server side.
In order to develop a client, we only need one socket connected to a remote server. All we have to do is use the connect() system call from the library:
int connect(int sockfd, const struct sockaddr *serv_addr, socklen_t addrlen); Its parameters are quite intuitive:
The function predictably returns 0 in for success and -1 for failure, with errno set to indicate the error.
Once more, all of the data needed for the connection can be found in the structure returned by getaddrinfo() :
int status; int socket_fd; struct addrinfo hints; struct addrinfo *res; // fill out hints to prepare getaddrinfo() call status = getaddrinfo("www.example.com", "http", &hints, &res); // check if getaddrinfo() failed socket_fd = socket(res->ai_family, res->ai_socktype, res->ai_protocol); // check if socket() failed connect(socket_fd, res->ai_addr, res->ai_addrlen); There we go! Our socket is now ready to send and receive data. But before we get to how to do that, let’s first take a look at establishing a connection from the server side.
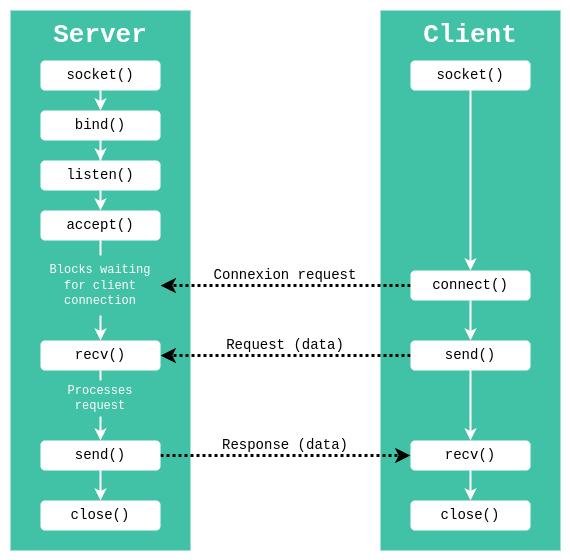
If we want to develop a server, the connection will need to be done in three steps. First, we need to bind our socket to a local address and port. Then, we’ll have to listen to the port to detect incoming connection requests. And finally, we need to accept those client connection requests.
The bind() function of allows us to link our socket to a local address and port. Its prototype est practically identical to its twin function connect() , which we examined for the client side:
int bind(int sockfd, const struct sockaddr *addr, socklen_t addrlen); Just like connect() , the parameters of bind() are:
As expected, the function returns 0 for success and -1 to indicate an error, with the error code in errno .
Next, we need to mark the socket as “passive”, meaning it will be used to accept incoming connection requests on the address and port it is bound to. For this, we will use the listen() function, which is also in .
int listen(int sockfd, int backlog); The listen() function takes two parameters:
If the call to listen() succeeds, the function returns 0. If it fails, it returns -1 and sets errno accordingly.
Finally, we must accept the connection requests from a remote client. When a client connect() s on the port of our machine that our socket is listen() ing to, its request is put in the pending queue. When we accept() the request, that function will return a new file descriptor bound to the client’s address, through which we will be able to communicate with that client. So we will end up with two file descriptors: our initial socket that will continue listening to our port, and a new file descriptor for the client, which we can use to send and receive data.
The prototype of the accept() function of is as follows:
int accept(int sockfd, struct sockaddr *addr, socklen_t *addrlen); Let’s take a closer look at its parameters:
The accept() function returns the file descriptor of the new socket, or -1 in case it encounters an error, which it indicates in errno .
Let’s create a micro-server which can accept a connection request with calls to the bind() , listen() , and accept() functions:
// server.c - a micro-server that accepts a connection before quitting #include #include #include #include #include #include #define PORT "4242" // our server's port #define BACKLOG 10 // max number of connection requests in queue int main(void) struct addrinfo hints; struct addrinfo *res; int socket_fd; int client_fd; int status; // sockaddr_storage is a structure that is not associated to // a particular family. This allows us to receive either // an IPv4 or an IPv6 address struct sockaddr_storage client_addr; socklen_t addr_size; // Prepare the address and port for the server socket memset(&hints, 0, sizeof hints); hints.ai_family = AF_UNSPEC; // IPv4 or IPv6 hints.ai_socktype = SOCK_STREAM; // TCP hints.ai_flags = AI_PASSIVE; // Automatically fills IP address status = getaddrinfo(NULL, PORT, &hints, &res); if (status != 0) fprintf(stderr, "getaddrinfo: %s\n", gai_strerror(status)); return (1); > // create socket, bind it and listen with it socket_fd = socket(res->ai_family, res->ai_socktype, res->ai_protocol); status = bind(socket_fd, res->ai_addr, res->ai_addrlen); if (status != 0) fprintf(stderr, "bind: %s\n", strerror(errno)); return (2); > listen(socket_fd, BACKLOG); // Accept incoming connection addr_size = sizeof client_addr; client_fd = accept(socket_fd, (struct sockaddr *)&client_addr, &addr_size); if (client_fd == -1) fprintf(stderr, "accept: %s\n", strerror(errno)); return (3); > printf("New connection! Socket fd: %d, client fd: %d\n", socket_fd, client_fd); // We are ready to communicate with the client via the client_fd! return (0); > // server.c - a micro-server that accepts a connection before quitting #include #include #include #include #include #include #define PORT "4242" // our server's port #define BACKLOG 10 // max number of connection requests in queue int main(void) struct sockaddr_in sa; int socket_fd; int client_fd; int status; // sockaddr_storage is a structure that is not associated to // a particular family. This allows us to receive either // an IPv4 or an IPv6 address struct sockaddr_storage client_addr; socklen_t addr_size; // Prepare the address and port for the server socket memset(&sa, 0, sizeof sa); sa.sin_family = AF_INET; // IPv4 only; use AF_INET6 for IPv6 sa.sin_addr.s_addr = htonl(INADDR_LOOPBACK); // 127.0.0.1, localhost sa.sin_port = htons(PORT); // create socket, bind it and listen with it socket_fd = socket(sa.sin_family, SOCK_STREAM, 0); status = bind(socket_fd, (struct sockaddr *)&sa, sizeof sa); if (status != 0) fprintf(stderr, "bind: %s\n", strerror(errno)); return (2); > listen(socket_fd, BACKLOG); // Accept incoming connection addr_size = sizeof client_addr; client_fd = accept(socket_fd, (struct sockaddr *)&client_addr, &addr_size); if (client_fd == -1) fprintf(stderr, "accept: %s\n", strerror(errno)); return (3); > printf("New connection! Socket fd: %d, client fd: %d\n", socket_fd, client_fd); // We are ready to communicate with the client via the client_fd! return (0); > When we compile and run this program, we’ll notice it looks to be idling. That’s because the accept() function is blocking the execution, waiting for a connection request. This will become an important factor when dealing with multiple client connections, and we will examine ways to handle this at the end of this article.
To simulate a connection request, we can open a new terminal and run the nc command (netcat), specifying the address of our local machine, localhost (or 127.0.0.1 ), and the port on which our little server is running - in this example, it’s 4242 .

There we go! Our server has detected and accepted the new connection. and displays the file descriptors of both our server’s listening socket and of the new client socket.
It’s not worth establishing a connection from a client to a server or vice-versa if we don’t know how to send and receive data. Clever readers might notice that since sockets are just file descriptors, we could probably just use the read() and write() system calls. And they’d be totally correct! But other functions exist, ones that give us more control over the way in which our data is sent and received…
The send() function from the library allows us to send data through a stream socket, which uses a TCP connection.
ssize_t send(int socket, const void *buf, size_t len, int flags); Its parameters are as follows:
The send() function returns the number of bytes that were successfully sent. Beware, send() might not be able to send the entire message in one go! This means that we’ll have to be careful to compare the value returned here with the length of the message we wish to send, in order to try sending the rest again if need be. As usual, this function can also return -1 if there is an error, and we can check errno for details.
For datagram sockets, the ones that use the connection-less protocol UDP, there is a similar function: sendto() . In addition to the above parameters, it also takes the destination address in the form of a sockaddr type structure.
Just like the opposite function send() , recv() can be found in . This function allows us to receive data through a socket. Its prototype is as follows:
ssize_t recv(int socket, void *buf, ssize_t len, int flags); The parameters of recv() are:
Just like send() , recv() returns the number of bytes it managed to store in the buffer. However, if recv() returns 0, it can only mean one thing: the remote computer has closed the connection. Naturally, the recv() function can also return -1 if it encounters an error, in which case it sets the error code in errno .
There is also another similar function, recvfrom() , for datagram type sockets which use the connection-less protocol UDP. On top of the parameters we supplied for recv() , this function also needs to know the source address from which the message is expected to be sent, in a sockaddr structure.
Once we are done sending and receiving data, we will be able to close our socket. Just as any other file descriptor, a socket can be closed with a simple call to close() from . This destroys the file descriptor and prevents any further communication with the socket: the remote side will raise an exception if it attempts to communicate with it by sending or receiving data.
But there is another function that is worth mentioning: shutdown() from . This function gives us more control over how we close our socket. Its prototype is:
int shutdown(int sockfd, int how); Its parameters are simple enough:
However, we must keep in mind that shutdown() does not destroy the socket file descriptor or free the memory associated with it. It only modifies its read and write permissions. A call to close() is therefore still necessary.
Like any self-respecting system call, shutdown() returns 0 on success and -1 on failure, with errno containing the error code.
Using everything we have learned about sockets up until now, let’s create two small programs. The first will be a server that will listen on our local machine’s port 4242. It will accept a client connection and will wait to receive a message to which it will then respond. The second program will be a client, and we will pass as an argument the message to send to the server. Then, the client will wait for the server reply before closing the connection.
// server.c - a micro-server that accepts a client connection, waits for a message, and replies #include #include #include #include #include #include #include #define PORT 4242 // our server's port #define BACKLOG 10 // max number of connection requests in queue int main(void) printf("---- SERVER ----\n\n"); struct sockaddr_in sa; int socket_fd; int client_fd; int status; struct sockaddr_storage client_addr; socklen_t addr_size; char buffer[BUFSIZ]; int bytes_read; // Prepare the address and port for the server socket memset(&sa, 0, sizeof sa); sa.sin_family = AF_INET; // IPv4 sa.sin_addr.s_addr = htonl(INADDR_LOOPBACK); // 127.0.0.1, localhost sa.sin_port = htons(PORT); // Create socket, bind it and listen with it socket_fd = socket(sa.sin_family, SOCK_STREAM, 0); if (socket_fd == -1) fprintf(stderr, "socket fd error: %s\n", strerror(errno)); return (1); > printf("Created server socket fd: %d\n", socket_fd); status = bind(socket_fd, (struct sockaddr *)&sa, sizeof sa); if (status != 0) fprintf(stderr, "bind error: %s\n", strerror(errno)); return (2); > printf("Bound socket to localhost port %d\n", PORT); printf("Listening on port %d\n", PORT); status = listen(socket_fd, BACKLOG); if (status != 0) fprintf(stderr, "listen error: %s\n", strerror(errno)); return (3); > // Accept incoming connection addr_size = sizeof client_addr; client_fd = accept(socket_fd, (struct sockaddr *)&client_addr, &addr_size); if (client_fd == -1) fprintf(stderr, "client fd error: %s\n", strerror(errno)); return (4); > printf("Accepted new connection on client socket fd: %d\n", client_fd); // Receive message from client socket bytes_read = 1; while (bytes_read >= 0) printf("Reading client socket %d\n", client_fd); bytes_read = recv(client_fd, buffer, BUFSIZ, 0); if (bytes_read == 0) printf("Client socket %d: closed connection.\n", client_fd); break ; > else if (bytes_read == -1) fprintf(stderr, "recv error: %s\n", strerror(errno)); break ; > else // We got a message, print it // and send a message back to client char *msg = "Got your message."; int msg_len = strlen(msg); int bytes_sent; buffer[bytes_read] = '\0'; printf("Message received from client socket %d: \"%s\"\n", client_fd, buffer); bytes_sent = send(client_fd, msg, msg_len, 0); if (bytes_sent == -1) fprintf(stderr, "send error: %s\n", strerror(errno)); > else if (bytes_sent == msg_len) printf("Sent full message to client socket %d: \"%s\"\n", client_fd, msg); > else printf("Sent partial message to client socket %d: %d bytes sent.\n", client_fd, bytes_sent); > > > printf("Closing client socket\n"); close(client_fd); printf("Closing server socket\n"); close(socket_fd); return (0); > // client.c - a micro-client that sends a message to a server and awaits a reply #include #include #include #include #include #include #include #define PORT 4242 // server port to connect to int main(int ac, char **av) printf("---- CLIENT ----\n\n"); struct sockaddr_in sa; int socket_fd; int status; char buffer[BUFSIZ]; int bytes_read; char *msg; int msg_len; int bytes_sent; if (ac != 2) printf("Usage: ./client \"Message to send\""); return (1); > // Prepare the address and port for the server socket memset(&sa, 0, sizeof sa); sa.sin_family = AF_INET; // IPv4 sa.sin_addr.s_addr = htonl(INADDR_LOOPBACK); // 127.0.0.1, localhost sa.sin_port = htons(PORT); // Create socket, connect it to remote server socket_fd = socket(sa.sin_family, SOCK_STREAM, 0); if (socket_fd == -1) fprintf(stderr, "socket fd error: %s\n", strerror(errno)); return (2); > printf("Created socket fd: %d\n", socket_fd); status = connect(socket_fd, (struct sockaddr *)&sa, sizeof sa); if (status != 0) fprintf(stderr, "connect error: %s\n", strerror(errno)); return (3); > printf("Connected socket to localhost port %d\n", PORT); // Send a message to server msg = av[1]; msg_len = strlen(msg); bytes_sent = send(socket_fd, msg, msg_len, 0); if (bytes_sent == -1) fprintf(stderr, "send error: %s\n", strerror(errno)); > else if (bytes_sent == msg_len) printf("Sent full message: \"%s\"\n", msg); > else printf("Sent partial message: %d bytes sent.\n", bytes_sent); > // Wait for message from server via the socket bytes_read = 1; while (bytes_read >= 0) bytes_read = recv(socket_fd, buffer, BUFSIZ, 0); if (bytes_read == 0) printf("Server closed connection.\n"); break ; > else if (bytes_read == -1) fprintf(stderr, "recv error: %s\n", strerror(errno)); break ; > else // We got a message, print it buffer[bytes_read] = '\0'; printf("Message received: \"%s\"\n", buffer); break ; > > printf("Closing socket\n"); close(socket_fd); return (0); > Now, we can compile and run the server in one terminal and the client in another. What is the result?
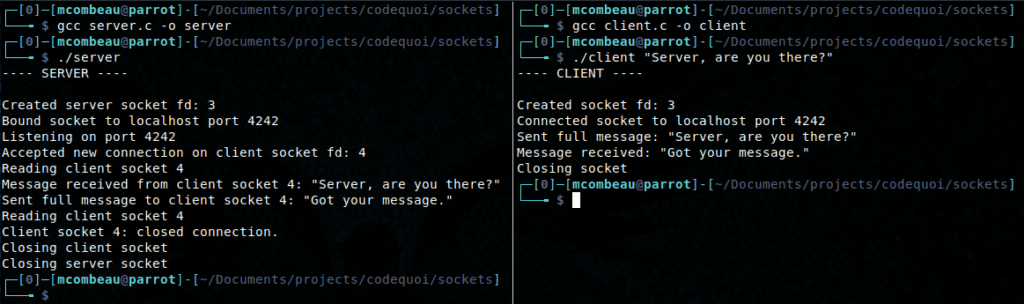
The server received the message we asked the client to sent, and managed to reply with its confirmation! The client then closed its socket, which the server was able to detect since recv() returned 0.
We might have noticed during our tests that a large number of the functions we use with sockets, like accept() and recv() are blocking. This means that they suspend our process until their own executions are finished. If we run our micro-server all by itself, without ever connecting a client, it will stay indefinitely blocked on accept() since that system call will wait for a connection request that will never come.
This is not inherently a bad thing, but it can cause issues for a server that attempts to handle several clients at the same time. If we are waiting to receive data from a client, it should not stop us from accepting a new connection or another message from another client. This is another aspect of concurrency, where one program must deal with several things simultaneously.
Thankfully, there are “multiplexing” methods that can make our sockets non-blocking, and that can detect when they are ready to be used.
When we invoke the socket() system call to get a file descriptor for our socket, the operating system’s kernel automatically creates it as “blocking”. If we so desire, we can transform it into a non-blocking socket with the file descriptor manipulation function fcntl() from and , like this:
. socket_fd = socket(PF_INET, SOCK_STREAM, 0); fcntl(socket_fd, F_SETFL, O_NONBLOCK); . When we make the socket non-blocking with O_NONBLOCK , it prevents system calls like recv() from suspending out program during their executions. If there is nothing to read from the socket, recv() immediately returns with -1 and sets errno to EAGAIN or EWOULDBLOCK . With this information, we can loop over our sockets one by one to check if they have anything for us to read, and if not, we move onto the next. The same is possible for any blocking function such as accept() , for example.
However, looping over our client sockets in this way is a very intensive operation for out poor CPU, especially if there are hundreds! There are much better ways to handle this blocking issue, which we will discover now.
What would be convenient is a way to monitor all of our socket file descriptors and be notified when one of them is ready for an operation. After all, if we know the socket is ready, we can read or write to it without any risk of blocking.
This is exactly what the select() does. In order to use it, we’ll want to import , , , and . Its prototype is:
int select(int nfds, fd_set *readfds, fd_set *writefds, fd_set *exceptfds, struct timeval *timeout); Its parameters can seem a bit complicated, so let’s take a closer look at them:
If it succeeds, select() modifies each set to indicate which file descriptors are ready for an operation. It also returns the total number of file descriptors which are ready among the three sets. If none of the descriptors are ready before the timeout is reached, select() can return 0.
If it encounters an error, select() returns -1 and sets errno . In this case, it does not modify the file descriptor sets.
In order to manipulate the file descriptor sets that we want to monitor with select() , we will want to use the following macros:
void FD_CLR(int fd, fd_set *set); // Removes an fd from the set int FD_ISSET(int fd, fd_set *set); // Checks if an fd is part of the set void FD_SET(int fd, fd_set *set); // Adds an fd to the set void FD_ZERO(fd_set *set); // Sets the set to 0 The timeout parameter represents the maximum time limit spent in the select() function. Past this deadline, if none of the file descriptors of the sets it monitors become ready, select() will return. We will then be able to do other things, such as print a message to confirm we are still waiting.
The structure to use for the temporal value, timeval , can be found in :
struct timeval long tv_sec; // seconds long tv_usec; // microseconds >; If this time value is set to 0, select() will return immediately; if we set it to NULL , select() will be able to block indefinitely if none of the file descriptors change states.
On some Linux systems, select() modifies the timeval value upon returning, to reflect the time that is left. This is far from universal, so for portability’s sake, we should not lean on this aspect.
Let’s try to create a small server that monitors each connected socket file descriptor with select() for reading. When one of them is ready to read, we will check if it is the server’s listening socket, in which case we will need to accept a new client connection. Indeed, it’s very useful to know that the listen() ing socket will be marked as ready to read if there is a connection request to accept! If the socket is a client socket, though, we will read the received message and relay it to all of the other connected sockets.
// server.c - a small server that monitors sockets with select() to accept connection requests and relay client messages #include #include #include #include #include #include #include #include #include #define PORT 4242 // our server's port int create_server_socket(void); void accept_new_connection(int listener_socket, fd_set *all_sockets, int *fd_max); void read_data_from_socket(int socket, fd_set *all_sockets, int fd_max, int server_socket); int main(void) printf("---- SERVER ----\n\n"); int server_socket; int status; // To monitor socket fds: fd_set all_sockets; // Set for all sockets connected to server fd_set read_fds; // Temporary set for select() int fd_max; // Highest socket fd struct timeval timer; // Create server socket server_socket = create_server_socket(); if (server_socket == -1) return (1); > // Listen to port via socket printf("[Server] Listening on port %d\n", PORT); status = listen(server_socket, 10); if (status != 0) fprintf(stderr, "[Server] Listen error: %s\n", strerror(errno)); return (3); > // Prepare socket sets for select() FD_ZERO(&all_sockets); FD_ZERO(&read_fds); FD_SET(server_socket, &all_sockets); // Add listener socket to set fd_max = server_socket; // Highest fd is necessarily our socket printf("[Server] Set up select fd sets\n"); while (1) // Main loop // Copy all socket set since select() will modify monitored set read_fds = all_sockets; // 2 second timeout for select() timer.tv_sec = 2; timer.tv_usec = 0; // Monitor sockets ready for reading status = select(fd_max + 1, &read_fds, NULL, NULL, &timer); if (status == -1) fprintf(stderr, "[Server] Select error: %s\n", strerror(errno)); exit(1); > else if (status == 0) // No socket fd is ready to read printf("[Server] Waiting. \n"); continue; > // Loop over our sockets for (int i = 0; i fd_max; i++) if (FD_ISSET(i, &read_fds) != 1) // Fd i is not a socket to monitor // stop here and continue the loop continue ; > printf("[%d] Ready for I/O operation\n", i); // Socket is ready to read! if (i == server_socket) // Socket is our server's listener socket accept_new_connection(server_socket, &all_sockets, &fd_max); > else // Socket is a client socket, let's read it read_data_from_socket(i, &all_sockets, fd_max, server_socket); > > > return (0); > // Returns the server socket bound to the address and port we want to listen to int create_server_socket(void) struct sockaddr_in sa; int socket_fd; int status; // Prepare the address and port for the server socket memset(&sa, 0, sizeof sa); sa.sin_family = AF_INET; // IPv4 sa.sin_addr.s_addr = htonl(INADDR_LOOPBACK); // 127.0.0.1, localhost sa.sin_port = htons(PORT); // Create the socket socket_fd = socket(sa.sin_family, SOCK_STREAM, 0); if (socket_fd == -1) fprintf(stderr, "[Server] Socket error: %s\n", strerror(errno)); return (-1); > printf("[Server] Created server socket fd: %d\n", socket_fd); // Bind socket to address and port status = bind(socket_fd, (struct sockaddr *)&sa, sizeof sa); if (status != 0) fprintf(stderr, "[Server] Bind error: %s\n", strerror(errno)); return (-1); > printf("[Server] Bound socket to localhost port %d\n", PORT); return (socket_fd); > // Accepts a new connection and adds the new socket to the set of all sockets void accept_new_connection(int server_socket, fd_set *all_sockets, int *fd_max) int client_fd; char msg_to_send[BUFSIZ]; int status; client_fd = accept(server_socket, NULL, NULL); if (client_fd == -1) fprintf(stderr, "[Server] Accept error: %s\n", strerror(errno)); return ; > FD_SET(client_fd, all_sockets); // Add the new client socket to the set if (client_fd > *fd_max) *fd_max = client_fd; // Update the highest socket > printf("[Server] Accepted new connection on client socket %d.\n", client_fd); memset(&msg_to_send, '\0', sizeof msg_to_send); sprintf(msg_to_send, "Welcome. You are client fd [%d]\n", client_fd); status = send(client_fd, msg_to_send, strlen(msg_to_send), 0); if (status == -1) fprintf(stderr, "[Server] Send error to client %d: %s\n", client_fd, strerror(errno)); > > // Read the message from a socket and relay it to all other sockets void read_data_from_socket(int socket, fd_set *all_sockets, int fd_max, int server_socket) char buffer[BUFSIZ]; char msg_to_send[BUFSIZ]; int bytes_read; int status; memset(&buffer, '\0', sizeof buffer); bytes_read = recv(socket, buffer, BUFSIZ, 0); if (bytes_read 0) if (bytes_read == 0) printf("[%d] Client socket closed connection.\n", socket); > else fprintf(stderr, "[Server] Recv error: %s\n", strerror(errno)); > close(socket); // Close the socket FD_CLR(socket, all_sockets); // Remove socket from the set > else // Relay the received message to all connected sockets // but not to the server socket or the sender's socket printf("[%d] Got message: %s", socket, buffer); memset(&msg_to_send, '\0', sizeof msg_to_send); sprintf(msg_to_send, "[%d] says: %s", socket, buffer); for (int j = 0; j fd_max; j++) if (FD_ISSET(j, all_sockets) && j != server_socket && j != socket) status = send(j, msg_to_send, strlen(msg_to_send), 0); if (status == -1) fprintf(stderr, "[Server] Send error to client fd %d: %s\n", j, strerror(errno)); > > > > > We’ll note here that we have two sets of file descriptors: all_sockets , which contains all of the connected socket file descriptors, and read_fds , the set that will be monitored for reading. The all_sockets set is vital in order not to lose file descriptors along the way, since select() is known to modify the read_fds set in order to tell us which descriptors are ready. So we want to add the file descriptors of each new connection to the all_sockets set, and it’s also this set from which we need to remove sockets that have been closed. At the beginning of our main loop, we can copy the contents of all_sockets into read_fds in order to ensure that select() has an up-to-date set of sockets to monitor.
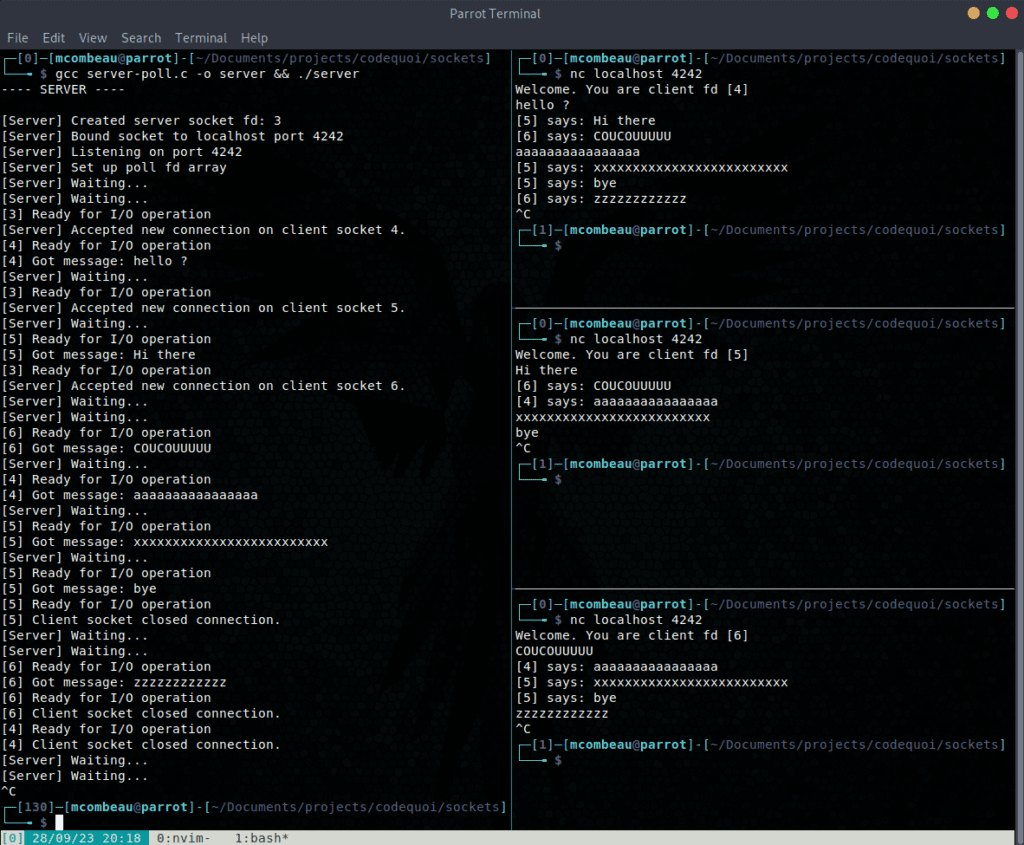
Let’s test this code by running our little server. In other terminal windows, we can use nc as a client to connect to the address and port of our server (in this case, localhost port 4242 ). We will then be able to send message which should appear for all of the other connected clients:
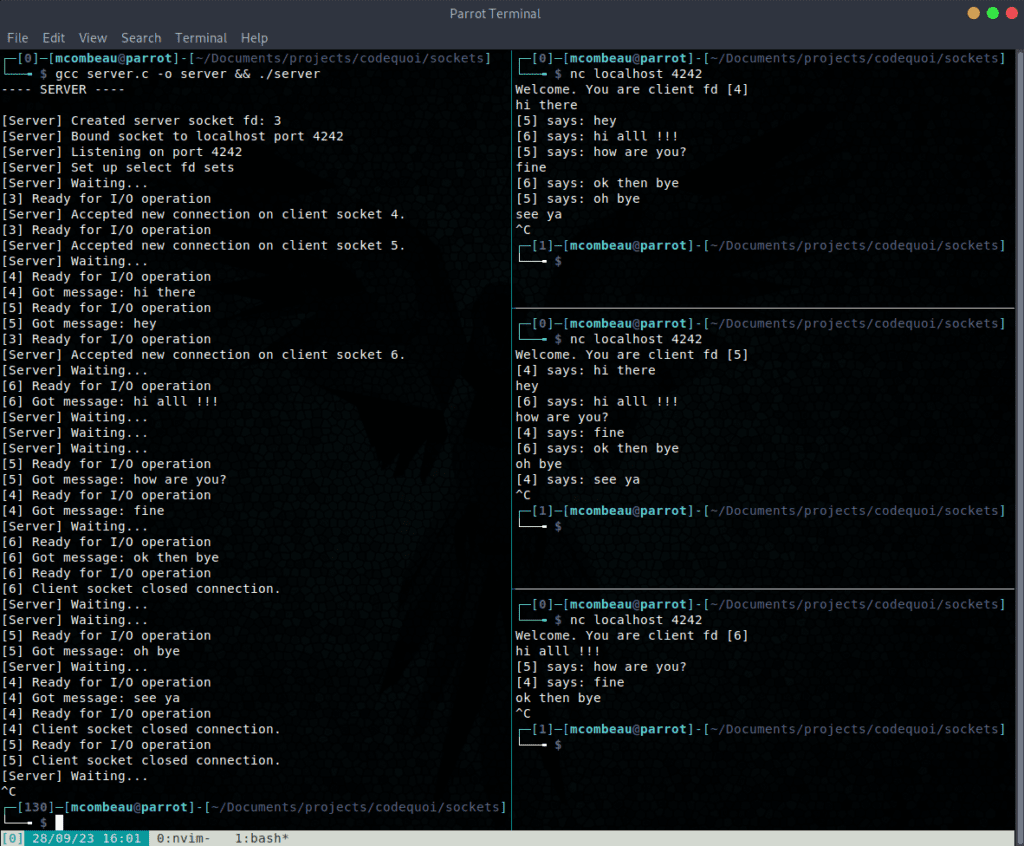
As we can see, our messages are correctly relayed to the other connected clients, without ever blocking. Sometimes, when select() finds no file descriptors that are ready to read, the server prints "Waiting. " , which shows that select() is indeed working as expected.
We have the beginnings of a chat server, here! Ideally, we should also be monitoring our sockets for writing before sending them data, but now that we understand how select() works, it won’t be too difficult to implement. For this, we would need to add a second loop after our select() call, to check the set of file descriptors we’re monitoring for writing. However, this separation between the different sets of events we want to monitor about our sockets is not ideal…
The monitoring system we can build with select() can be a little inefficient though. Having to loop over three separate sets of file descriptors to know which are ready for reading or writing or have encountered an error is not terribly practical. This is why an alternative to select() was developed, one that uses a single structure to monitor any type of change within its file descriptors: poll() .
This is the prototype of the poll() function from :
int poll(struct pollfd fds[], nfds_t nfds, int timeout); Its parameters are:
The poll() function returns the number of file descriptors for which it has detected a desired event. If poll() returns 0, it means that our timeout has expired without any file descriptors being ready. Of course, poll() returns -1 on failure and indicates the encountered error in errno .
Let’s take a closer look at the pollfd structure:
struct pollfd int fd; // File descriptor short events; // Requested events short revents; // Detected events >; So we will have an array composed of several of these structures where we will indicate the file descriptor of each of our sockets as well as the events we want to request for each of them.
There are several events we can supply in the events field. The two most immediately useful ones are the following, but there are others listed on the manual page for poll() :
Of course, we can request any combination of events with a bitwise OR.
Once poll() is done with its execution, we can take a look at the revents field associated to each element in our array, in order to check if POLLIN or POLLOUT are set.
Let’s attempt to replicate our previous server example with poll() instead of select() . The server will work in the same way: we will add our sockets to the poll() array in order to detect when one of them is ready to read. If it’s the server’s listening socket, we’ll accept the incoming connection request. If it’s a client socket, we will read its message and relay it to all other connected sockets.
// server-poll.c - a small server that monitors sockets with poll() to accept connection requests and relay client messages #include #include #include #include #include #include #include #include #include #include #define PORT 4242 // our server's port int create_server_socket(void); void accept_new_connection(int server_socket, struct pollfd **poll_fds, int *poll_count, int *poll_size); void read_data_from_socket(int i, struct pollfd **poll_fds, int *poll_count, int server_socket); void add_to_poll_fds(struct pollfd *poll_fds[], int new_fd, int *poll_count, int *poll_size); void del_from_poll_fds(struct pollfd **poll_fds, int i, int *poll_count); int main(void) printf("---- SERVER ----\n\n"); int server_socket; int status; // To monitor client sockets: struct pollfd *poll_fds; // Array of socket file descriptors int poll_size; // Size of descriptor array int poll_count; // Current number of descriptors in array // Create server listening socket server_socket = create_server_socket(); if (server_socket == -1) return (1); > // Listen to port via socket printf("[Server] Listening on port %d\n", PORT); status = listen(server_socket, 10); if (status != 0) fprintf(stderr, "[Server] Listen error: %s\n", strerror(errno)); return (3); > // Prepare the array of file descriptors for poll() // We'll start with enough room for 5 fds in the array, // we'll reallocate if necessary poll_size = 5; poll_fds = calloc(poll_size + 1, sizeof *poll_fds); if (!poll_fds) return (4); > // Add the listening server socket to array // with notification when the socket can be read poll_fds[0].fd = server_socket; poll_fds[0].events = POLLIN; poll_count = 1; printf("[Server] Set up poll fd array\n"); while (1) // Main loop // Poll sockets to see if they are ready (2 second timeout) status = poll(poll_fds, poll_count, 2000); if (status == -1) fprintf(stderr, "[Server] Poll error: %s\n", strerror(errno)); exit(1); > else if (status == 0) // None of the sockets are ready printf("[Server] Waiting. \n"); continue; > // Loop on our array of sockets for (int i = 0; i poll_count; i++) if ((poll_fds[i].revents & POLLIN) != 1) // The socket is not ready for reading // stop here and continue the loop continue ; > printf("[%d] Ready for I/O operation\n", poll_fds[i].fd); // The socket is ready for reading! if (poll_fds[i].fd == server_socket) // Socket is our listening server socket accept_new_connection(server_socket, &poll_fds, &poll_count, &poll_size); > else // Socket is a client socket, read it read_data_from_socket(i, &poll_fds, &poll_count, server_socket); > > > return (0); > int create_server_socket(void) struct sockaddr_in sa; int socket_fd; int status; // Prepare the address and port for the server socket memset(&sa, 0, sizeof sa); sa.sin_family = AF_INET; // IPv4 sa.sin_addr.s_addr = htonl(INADDR_LOOPBACK); // 127.0.0.1, localhost sa.sin_port = htons(PORT); // Create listening socket socket_fd = socket(sa.sin_family, SOCK_STREAM, 0); if (socket_fd == -1) fprintf(stderr, "[Server] Socket error: %s\n", strerror(errno)); return (-1); > printf("[Server] Created server socket fd: %d\n", socket_fd); // Bind socket to address and port status = bind(socket_fd, (struct sockaddr *)&sa, sizeof sa); if (status != 0) fprintf(stderr, "[Server] Bind error: %s\n", strerror(errno)); return (-1); > printf("[Server] Bound socket to localhost port %d\n", PORT); return (socket_fd); > void accept_new_connection(int server_socket, struct pollfd **poll_fds, int *poll_count, int *poll_size) int client_fd; char msg_to_send[BUFSIZ]; int status; client_fd = accept(server_socket, NULL, NULL); if (client_fd == -1) fprintf(stderr, "[Server] Accept error: %s\n", strerror(errno)); return ; > add_to_poll_fds(poll_fds, client_fd, poll_count, poll_size); printf("[Server] Accepted new connection on client socket %d.\n", client_fd); memset(&msg_to_send, '\0', sizeof msg_to_send); sprintf(msg_to_send, "Welcome. You are client fd [%d]\n", client_fd); status = send(client_fd, msg_to_send, strlen(msg_to_send), 0); if (status == -1) fprintf(stderr, "[Server] Send error to client %d: %s\n", client_fd, strerror(errno)); > > void read_data_from_socket(int i, struct pollfd **poll_fds, int *poll_count, int server_socket) char buffer[BUFSIZ]; char msg_to_send[BUFSIZ]; int bytes_read; int status; int dest_fd; int sender_fd; sender_fd = (*poll_fds)[i].fd; memset(&buffer, '\0', sizeof buffer); bytes_read = recv(sender_fd, buffer, BUFSIZ, 0); if (bytes_read 0) if (bytes_read == 0) printf("[%d] Client socket closed connection.\n", sender_fd); > else fprintf(stderr, "[Server] Recv error: %s\n", strerror(errno)); > close(sender_fd); // Close socket del_from_poll_fds(poll_fds, i, poll_count); > else // Relays the received message to all connected sockets // but not to the server socket or the sender socket printf("[%d] Got message: %s", sender_fd, buffer); memset(&msg_to_send, '\0', sizeof msg_to_send); sprintf(msg_to_send, "[%d] says: %s", sender_fd, buffer); for (int j = 0; j *poll_count; j++) dest_fd = (*poll_fds)[j].fd; if (dest_fd != server_socket && dest_fd != sender_fd) status = send(dest_fd, msg_to_send, strlen(msg_to_send), 0); if (status == -1) fprintf(stderr, "[Server] Send error to client fd %d: %s\n", dest_fd, strerror(errno)); > > > > > // Add a new file descriptor to the pollfd array void add_to_poll_fds(struct pollfd *poll_fds[], int new_fd, int *poll_count, int *poll_size) // If there is not enough room, reallocate the poll_fds array if (*poll_count == *poll_size) *poll_size *= 2; // Double its size *poll_fds = realloc(*poll_fds, sizeof(**poll_fds) * (*poll_size)); > (*poll_fds)[*poll_count].fd = new_fd; (*poll_fds)[*poll_count].events = POLLIN; (*poll_count)++; > // Remove an fd from the poll_fds array void del_from_poll_fds(struct pollfd **poll_fds, int i, int *poll_count) // Copy the fd from the end of the array to this index (*poll_fds)[i] = (*poll_fds)[*poll_count - 1]; (*poll_count)--; > We had to add a couple of small utility functions to handle adding and removing socket file descriptors to and from our pollfd array, but apart from that, not much had to change compared to select() . Also, the result is identical to our select() example, but the execution of our program is now more efficient, since we only have one structure to check to know if a socket is ready to read or write.
However, let’s not forget that for a real server, we would also need to monitor sockets before sending them data! For that, all we’d need to do is add a condition inside of the loop we already have over the poll_fds array, which is much more convenient than the multiple different loops that select() imposes on us.
The socket monitoring systems that select() and poll() provide can both turn out to be very slow the more connections there are, though. To handle a very large number of connections, it’s often preferable to use an event handling library like libevent.
A little tip to share, a nagging question to ask, or a strange discovery to discuss about sockets, socket file descriptor monitoring, or network programming in general? I’d love to read and respond to it all in the comments. Happy coding !